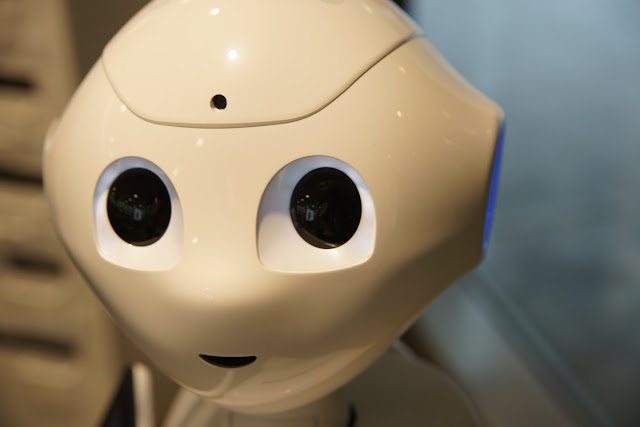
2) 카메라를 통한 사람 얼굴 감지와 머리에 달린 마이크로 대화 인식하는 것이 사람과 interaction하는데 사용되는 핵심 도구였다.
3) 페퍼가 가끔씩 주변을 훑어보면서 카메라 앵글 안으로 사람 얼굴이 들어왔을 때 사람 얼굴 감지 기능이 실행된다. 인식된 얼굴 위치로 페퍼가 얼굴을 이리저리 돌리며 아이컨택을 하는데, 이 행동을 꽤 높은 중요도로 수행하는 것처럼 보였다.
4) 대화 인식은 일본어밖에 되지 않아서 직원에게 부탁을 해봤는데 제대로 테스트해보지는 못했다. ㅠㅠ 며칠 뒤 Ro-Man 학회장에서 관련 연구를 하는 연구원에게 물어봤더니 지금은 알데바란 로보틱스의 음성 인식 기술을 사용하고 있다고 한다. 로봇 나오(Nao)의 음성 인식 기술을 참고하면 될듯.
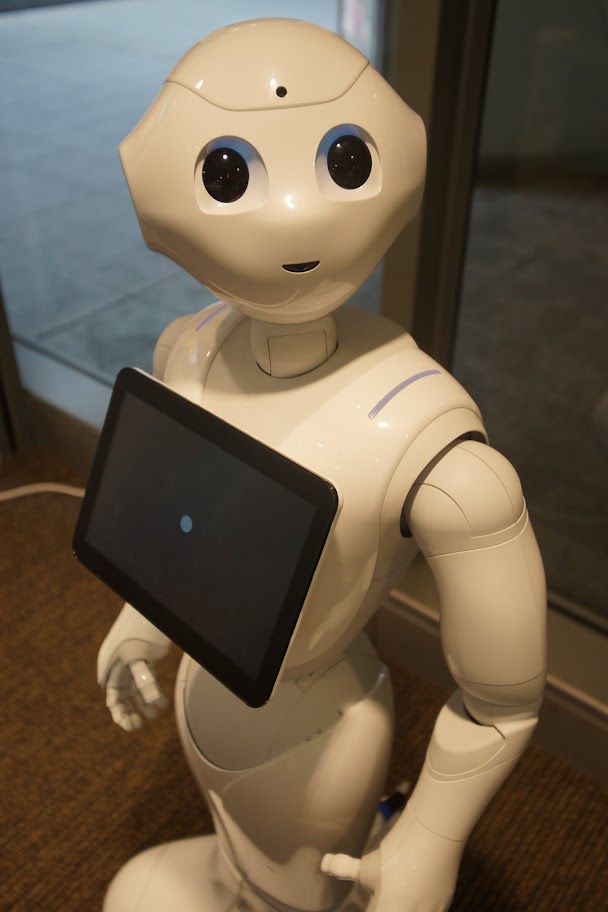
5) 손가락은 무언가 진짜로 집을 수 있는 힘을 내지는 못할 것 같았다. 그리고 손가락끼리 무언가 연결되어 있는지 한 손가락을 흔들면 다른쪽 손가락이 따라서 움직였다.
6) 아무래도 직관적인 interaction은 이전에 개발된 로봇들에서 크게 달라 보이지 않았다.
7) 사람의 감정을 인식한다고 했는데 그 기능이 지금 구현되어 있는지는 의문이었다.
8) IBM의 인공지능 왓슨(Watson)을 탑재할 계획이라고 하는데 그렇게 되면 우선 대화 자체는 풍성해질듯. 그 이외의 로봇 기능이 어떻게 개선될지는 잘 모르겠다. 마이크, 카메라 등의 센서가 지금 그대로라면 대화 기능 이외는 비슷할 것 같다는 생각이 든다.
9) 페퍼를 가만히 놔두면 사람들의 관심을 끌기 위해 가끔씩 이런 저런 간단한 행동들을 하는데, 스타크래프트나 롤의 캐릭터들을 가만히 놔뒀을 때 보이는 행동들이 연상됐다.