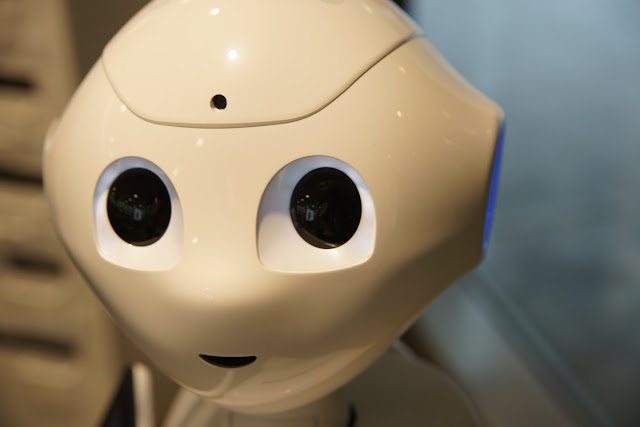
2) 카메라를 통한 사람 얼굴 감지와 머리에 달린 마이크로 대화 인식하는 것이 사람과 interaction하는데 사용되는 핵심 도구였다.
3) 페퍼가 가끔씩 주변을 훑어보면서 카메라 앵글 안으로 사람 얼굴이 들어왔을 때 사람 얼굴 감지 기능이 실행된다. 인식된 얼굴 위치로 페퍼가 얼굴을 이리저리 돌리며 아이컨택을 하는데, 이 행동을 꽤 높은 중요도로 수행하는 것처럼 보였다.
4) 대화 인식은 일본어밖에 되지 않아서 직원에게 부탁을 해봤는데 제대로 테스트해보지는 못했다. ㅠㅠ 며칠 뒤 Ro-Man 학회장에서 관련 연구를 하는 연구원에게 물어봤더니 지금은 알데바란 로보틱스의 음성 인식 기술을 사용하고 있다고 한다. 로봇 나오(Nao)의 음성 인식 기술을 참고하면 될듯.
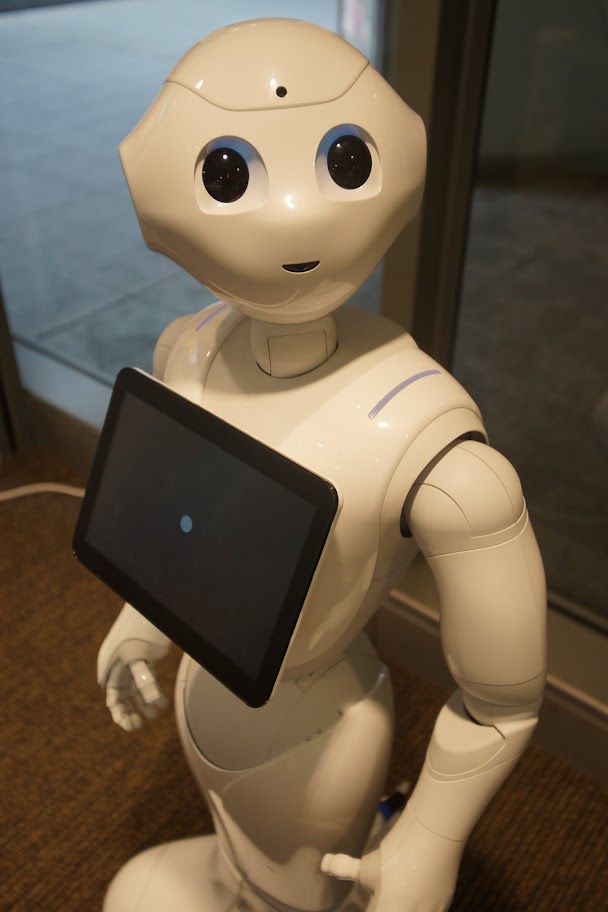
5) 손가락은 무언가 진짜로 집을 수 있는 힘을 내지는 못할 것 같았다. 그리고 손가락끼리 무언가 연결되어 있는지 한 손가락을 흔들면 다른쪽 손가락이 따라서 움직였다.
6) 아무래도 직관적인 interaction은 이전에 개발된 로봇들에서 크게 달라 보이지 않았다.
7) 사람의 감정을 인식한다고 했는데 그 기능이 지금 구현되어 있는지는 의문이었다.
8) IBM의 인공지능 왓슨(Watson)을 탑재할 계획이라고 하는데 그렇게 되면 우선 대화 자체는 풍성해질듯. 그 이외의 로봇 기능이 어떻게 개선될지는 잘 모르겠다. 마이크, 카메라 등의 센서가 지금 그대로라면 대화 기능 이외는 비슷할 것 같다는 생각이 든다.
9) 페퍼를 가만히 놔두면 사람들의 관심을 끌기 위해 가끔씩 이런 저런 간단한 행동들을 하는데, 스타크래프트나 롤의 캐릭터들을 가만히 놔뒀을 때 보이는 행동들이 연상됐다.
Sopo is a companion and education robot that can be used by kids, adults and the elderly. It can bring you drinks from its fridge, read you stories or keep your party pumping with a disco ball attachment.