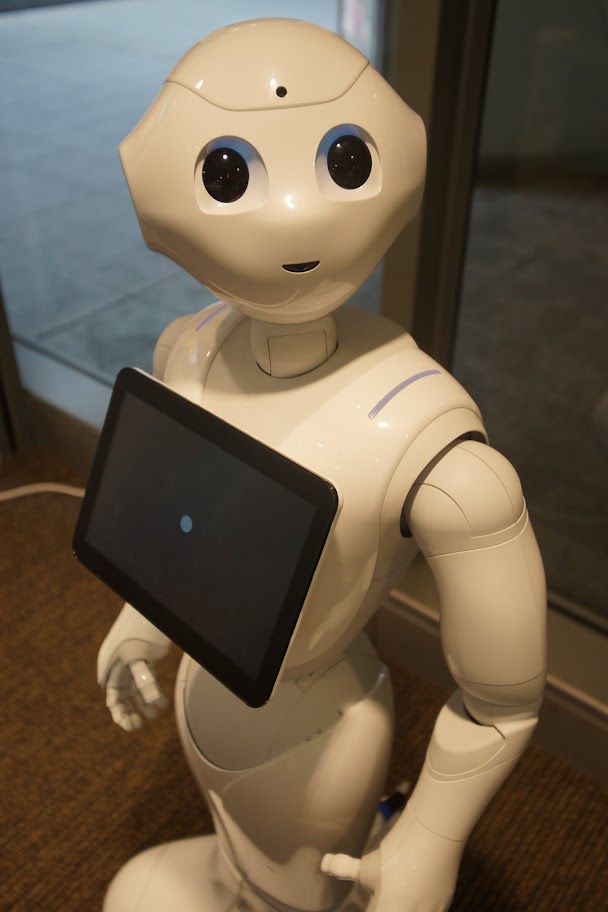
2) 카메라를 통한 사람 얼굴 감지와 머리에 달린 마이크로 대화 인식하는 것이 사람과 interaction하는데 사용되는 핵심 도구였다.
3) 페퍼가 가끔씩 주변을 훑어보면서 카메라 앵글 안으로 사람 얼굴이 들어왔을 때 사람 얼굴 감지 기능이 실행된다. 인식된 얼굴 위치로 페퍼가 얼굴을 이리저리 돌리며 아이컨택을 하는데, 이 행동을 꽤 높은 중요도로 수행하는 것처럼 보였다.
4) 대화 인식은 일본어밖에 되지 않아서 직원에게 부탁을 해봤는데 제대로 테스트해보지는 못했다. ㅠㅠ 며칠 뒤 Ro-Man 학회장에서 관련 연구를 하는 연구원에게 물어봤더니 지금은 알데바란 로보틱스의 음성 인식 기술을 사용하고 있다고 한다. 로봇 나오(Nao)의 음성 인식 기술을 참고하면 될듯.
5) 손가락은 무언가 진짜로 집을 수 있는 힘을 내지는 못할 것 같았다. 그리고 손가락끼리 무언가 연결되어 있는지 한 손가락을 흔들면 다른쪽 손가락이 따라서 움직였다.
6) 아무래도 직관적인 interaction은 이전에 개발된 로봇들에서 크게 달라 보이지 않았다.
7) 사람의 감정을 인식한다고 했는데 그 기능이 지금 구현되어 있는지는 의문이었다.
8) IBM의 인공지능 왓슨(Watson)을 탑재할 계획이라고 하는데 그렇게 되면 우선 대화 자체는 풍성해질듯. 그 이외의 로봇 기능이 어떻게 개선될지는 잘 모르겠다. 마이크, 카메라 등의 센서가 지금 그대로라면 대화 기능 이외는 비슷할 것 같다는 생각이 든다.
9) 페퍼를 가만히 놔두면 사람들의 관심을 끌기 위해 가끔씩 이런 저런 간단한 행동들을 하는데, 스타크래프트나 롤의 캐릭터들을 가만히 놔뒀을 때 보이는 행동들이 연상됐다.
인공지능 그리고 로봇공학의 발달과 함께 로봇을 대하는 윤리적 태도에 대한 여러 관점이 제시되고 있다. 로봇에 의해 빠르게 변화하는 사회 속에서 잊지 말아야 할 가치는 무엇일지 고민해봐야 할 때다.
서비스 로봇과 소셜 로봇 분야의 발전으로 로봇은 일상생활 가까이에 존재하게 되었고 앞으로 더욱 많은 로봇이 인간과 공존하게 될 예정이다. 로봇전시회장에서도 이러한 변화를 확인할 수 있는데, 로봇들은 더는 ‘만지지 마시오’라는 경고 문구 너머에 존재하지 않고, 직접 만져보고 교감해 볼 수 있는 체험 가능한 공간에서 관람객 주변을 돌아다니고 있다.
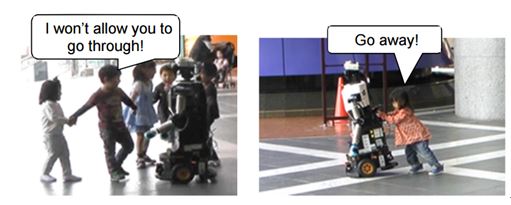
이러한 로봇의 접근성은 특히 아이들의 호기심을 유발하는 아주 좋은 자극이 되기도 하지만, 의외로 아이들은 로봇을 향해 공격적인 행동을 보일 때가 많다. 앞서 이야기한 전시회장의 환경에서도 아이들은 로봇이 이동하는 경로를 막아선다거나 로봇을 향해 나쁜 말을 내뱉고, 심지어 때리기까지 하는 모습들을 흔하게 발견할 수 있다. 필자도 국내 로봇전시회인 로보월드 행사에서 로봇을 시연한 적이 있는데, 로봇을 때리고 못살게 구는 아이들 때문에 곤혹을 느낀 적이 한 두번이 아니었다.
▲ 사진설명: 전시회장에서 로봇을 못살게 구는 아이들사진출처: 논문 Brscić, Drazen, et al. "Escaping from Children's Abuse of Social Robots."Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, 2015
스웨덴 로봇 드라마 ‘리얼 휴먼’에서는 여성형 로봇이 길거리에 나갔다가 길거리의 아이들에게 성추행을 당하는 모습을 담아내기도 했었다. 극 중에서 로봇은 동양계 여성으로 묘사되어 사회적 약자의 모습을 갖춘 데다가 인간이 아니기 때문에 소중히 다룰 필요가 없다는 점이 부각되었다. 이 드라마는 인간의 공격성 혹은 우월감의 표출이 로봇에게 나타날 수 있다는 점을 극명하게 드러내어 그 문제점을 지적하였다.
지난 3월 초에 미국 포틀랜드에서 열린 ACM/IEEE 인간-로봇 상호작용(HRI) 국제 학회에서는 아이들의 로봇을 향한 공격성을 어떻게 극복 또는 회피할 것인가에 대한 연구가 발표되었다. 이 연구에서는 아이들의 로봇을 향한 공격성을 지속적인 방해, 공격적 언어 사용, 폭력의 세 종류로 구분했다. 그리고 어떤 상황에서 이러한 행동들이 나타나는지를 통계적으로 분석한 후에 그러한 상황이 나타날 조건에서는 로봇이 그 상황을 회피하도록 구현했다. 이 연구에서는 로봇을 향한 아이들의 공격성을 문제 삼기는 했지만, 해결책으로 공격성을 없애는 것보다는 로봇이 그 상황을 회피하도록 하는 것을 제안했다. 더불어 굳이 로봇을 의인화시켜서 볼 필요가 있는가에 대한 열린 질문도 남겨두었다.
이탈리아의 로봇 연구자 살비니(Salvini)와 그의 동료들도 로봇에 대한 사람들의 공격성을 보고한 바 있다. 사람들은 로봇을 발로 차거나 때리는 등의 공격적이고 괴롭히는 행동을 하는데, 특히 로봇이 사람에 의해 조종되고 있지 않고 혼자 남아있게 될 경우에 사람들의 공격적인 행동이 나타난다고 설명했다.
물론 로봇을 굳이 사람과 동등한 인격체로 간주하여 괴롭힘을 받는 로봇에 대해 과잉 반응할 필요는 없을지 모른다. 하지만 사람과 비슷한 모습의 로봇들이 점차 개발되고 있으므로 자칫 로봇에 대한 공격성이 사람에게까지 확장될 수 있다는 우려의 목소리도 커지고 있다.
로봇 연구자들은 이러한 우려를 간과하기보다 역발상으로 이러한 현상이 인간 사회에 어떤 ‘사회적 유익’을 가져올 수 있을지 고민해 볼 필요가 있다. 그중 하나가 바로 로봇을 통해 사람들에게 윤리의식을 가르칠 수 있는가에 대한 가능성이다. 만약 로봇을 향한 공격성을 절제할 수 있다면, 사람에 대한 공격적인 행동 조절에도 긍정적인 영향을 줄 수 있을지 모른다. 즉, 로봇을 소중히 다루게 함으로써 존재의 소중함과 윤리에 대한 기초적 개념을 교육하는 것에 대한 고민이다.
앞에서는 로봇을 향한 사람들의 공격성을 이야기했지만, 사람들은 로봇에게 동정심을 느끼기도 한다. 뉴질랜드 캔터베리 대학의 크리스토프 바트넥(Christoph Bartneck) 교수는 학대받는 로봇을 보면서 사람들은 학대받는 사람들을 보는 것만큼은 아니지만, 로봇에게 동정심을 느낀다고 보고했다. 더불어 지능을 가진 듯한 로봇을 파괴하는 것에 사람들은 어려움을 느꼈다는 연구 결과도 발표했다. 또한, 뒤스부르크-에센 대학의 A.M. 로센탈-폰 데르 퓌텐(Astrid M. Rosenthal-vol der Putten)도 로봇이 고문당하는 영상을 볼 때 사람들은 그 로봇에게 동정심과 불편한 기분을 느끼게 된다고 발표했다. 이처럼 로봇을 대상으로도 인간의 공감능력은 여전히 나타난다.
철학자 데이비드 흄(David Hume)은 감정이 윤리의 기초가 된다고 밝혔다. 따라서 로봇을 향한 불편한 감정이나 동정심을 바탕으로 사람들에게 윤리의식의 개념을 교육할 수 있을 것으로 기대해볼 수 있다. 정서를 가진 로봇이 사람과 교감하면서 사람들의 공격성을 낮추고 공감과 존중을 알아갈 수 있도록 돕는 것이다.
반면, 로봇과 인간을 대하는 사람들의 도덕적 기준이 다르기에 로봇을 향한 인간의 공감을 윤리 교육의 절대적인 요소로 보기 힘들다는 관점도 존재한다. 앞서 크리스토프 바트넥 교수의 연구 결과에서도 대상이 로봇이냐 사람이냐에 따라 사람들의 동정심 정도는 차이가 있었다.
이화여대 곽소나 교수팀은 얼굴 로봇 ‘멍(Mung)’을 이용하여 비교실험을 진행하였다. 멍 로봇은 전기 충격에 따라 얼굴에 멍을 나타내도록 하여 로봇의 감정(고통) 상태를 표현하록 구현된 로봇이다. 비교실험에서는 두 종류의 로봇이 사용되었다. 한 로봇은 사람에 의해 원격으로 감정 상태가 조종되었고, 다른 로봇은 로봇 스스로 감정을 만들어 얼굴에 표현하도록 구현되었다. 실험 결과 멍 로봇의 표현에 따라 피실험자는 스스로 감정 표현을 한다고 알려진 로봇보다 사람에 의해 조종된다고 알려진 로봇의 고통에 더 공감했다. 즉, 사람들은 로봇보다 로봇 너머에 있는 사람의 존재 여부를 더 의식했다는 의미다.
▲ 사진설명: 멍(Mung) 로봇과 고통 표현
미국 브라운 대학의 버트람 말레(Bertram F. Malle) 교수팀은 ACM/IEEE 인간-로봇 상호작용(HRI) 국제 학회에서 사람들은 인간과 로봇에게 각각 다른 도덕적 기준을 적용한다는 조사 결과를 발표했다. 조사 결과에 따르면 다수의 이익을 위해 한 사람을 희생하게 만드는 행동이 있을 때 사람들은 로봇이 그 행동을 하길 기대했다. 그리고 로봇이 아무런 행동을 하지 않았다면 사람들은 그 로봇을 비난했다. 반면, 로봇 대신 사람이 그러한 행동을 선택해야 한다면 아무런 행동을 하지 않는 경우가 사람들에게 덜 비난받았다. 즉, 로봇에게는 공리주의(Utilitarian)를 요구하고 그에 대한 책임을 물었지만 사람에게는 공리주의에 대한 책임을 상대적으로 적게 요구했다는 것이다.
이러한 인간과 로봇에 대한 도덕적 기준의 차이는 아직 로봇이 사람 수준의 지능이나 정서적 교감능력 수준에 도달하지 못해서 나타나는 것일 수도 있고, 로봇과 사람의 근본적인 존재적 차이 때문일 수도 있다.
만약, 그 차이가 전자의 경우라면 로봇과 인간의 경계가 모호해지는 때에, 인간과 로봇의 윤리체계와 관점이 재조정될지도 모른다. 최근 개봉했던 영화 ‘엑스 마키나(Ex Machina, 2015)’에서는 기존의 튜링 테스트를 뛰어 넘는 진화된 개념이 소개되었다. 그것은 바로 사람에게 상대가 로봇임을 알려준 이후에도 그 사람은 상대 로봇으로부터 인간성을 느끼는가에 대한 테스트다. 결국, 영화 속 주인공은 상대 로봇에게서 인간성을 발견하게 되었고, 그 로봇에 대한 동정심과 죄책감을 느꼈다. 영화 ‘채피(Chappie, 2015)’에서도 주인공 로봇은 자의식과 정서를 갖게 되는데, 그 로봇 주위의 사람들은 로봇에 대한 동정심과 책임감을 느꼈다. 또한, 영화 ‘인터스텔라(Interstellar, 2014)’에서 로봇 타스(Tars)가 자신을 희생할 때, 주인공은 그 로봇에게 미안함과 고마움을 느낀다.
그러나 이 이야기들은 모두 영화에서 나오는 이야기들이다. 영화와 현실에는 분명한 차이가 있다. 영화에서는 사람들이 로봇을 동등한 인격체로 받아들이는 것처럼 표현하지만, 현실에서는 아직 그 정도 수준의 로봇이 개발되지도 못했을뿐더러 로봇과 사람의 근본적인 존재적 차이에 대한 인식 역시 크다.
그럼에도 인공지능과 로봇공학의 발달이 갖고 미래는 분명 인간 사회의 많은 부분을 바꾸어놓을 것이다. 로봇은 인간의 동반자가 되어 한 가정 안에서 가족과 같은 존재가 될 수도 있고, 로봇이 인간을 뛰어넘고 인간을 지배하고자 하여 로봇과 인간은 적대적 관계가 될 수도 있다. 또는, 로봇이 인간의 성 노리개나 서바이벌 게임의 총알받이가 될 수도 있다. 이러한 사회는 아직 언제 올지 모르지만 그것이 가까운 미래가 될 것이라고 예상하는 것이 이상하지 않은 시대가 되었다. 그리고 청소로봇을 비롯하여 자율주행 자동차, 레스토랑 서빙 로봇, 박물관 안내 로봇, 영어 교육 로봇, 노인을 위한 교감 로봇, 자폐아 치료 로봇 등 이미 많은 부분이 로봇에 의해 변하고 있다.
책 '로봇정신'의 저자이자 로보티즈 수석연구원 한재권 박사는 로봇 윤리에 대한 그의 글에서 “잊지 말고 중심에 두어야 할 것은 사람과 생명의 가치”라고 강조했다. 로봇이 인간 사회의 많은 부분에 영향을 미치고 있는 요즘 잊지 말아야 할 것이 있다면 로봇의 존재 목적일 것이다. 바로, 로봇은 인간을 위해 존재하고, 그 최고봉에는 생명에 대한 존중, 그리고 자유와 평등이 있다. 로봇을 대하는 윤리적 태도와 관점 또한 이러한 목적 위에 세워져야 하지 않을까. 로봇 연구자들 뿐 아니라 일반 대중들도 로봇을 대하는 윤리적 태도에 대해 고민해봐야 할 때다.▒이원형ㆍKAIST 로보트 연구실
로봇이 능동적으로 자신의 상태를 표현하게 하여 안전성과 신뢰도를 확보하고자 하는 기술들이 시도되고 있다.
지난 CES 2015에서 발표된 메르세데스 벤츠의 자율주행 자동차에는 이전 자율주행 자동차에서 볼 수 없었던 기능이 담겨있었다. 그것은 주변 상황과 능동적으로 의사 소통할 수 있는 기능이었다. 보통의 자율주행 자동차는 주변에 사람이 지나가면 이를 인지하고 회피하는 동작을 하는데 그치지만, 벤츠사의 무인자동차에는 자동차 자신이 사람을 인식하고 있다는 것을 사용자에게 능동적으로 알려주는 기능이 추가되었다. 자동차 전방에 달린 LED 디스플레이에는 원 모양의 ‘가상 눈동자’가 표시되고, 앞에 지나가는 사람을 따라가도록 한 것이다. 사람의 눈동자가 누군가를 의식하고 쳐다보는 것을 연상케 했다.
▲ 사람이 지나갈 때 인식 여부를 표시 하며 사람을 기다리는 벤츠사의 무인 자동차
이러한 자율주행 자동차의 능동적 의사 소통 기능은 사람으로 하여금 자동차가 자신을 의식하고 있다는 것을 알게 해주기 때문에 심리적 안정감을 줄 수 있다. 그뿐 아니라, 자동차의 ‘가상 눈동자’가 사람을 따라다니지 않는다면 그 상황은 자동차가 사람을 인식하지 못하고 있다는 것을 역으로 알 수 있기 때문에 사람 스스로 위험한 상황을 피할 수도 있게 해준다. 심리적 안정감에 더불어 실제적 안전성도 확보할 수 있는 것이다.
사실 이러한 의사 소통 기능은 사람이 자동차를 직접 운전하는 경우에는 당연한 것이었다. 바로 좌우 점멸등이나 비상등, 정지등, 그리고 수신호 등이 운전자의 주행 의도나 상태를 자동차 외부로 나타낼 수 있는 방법이었고, 이 방법들을 통해 자동차 외부의 사람은 가던 길을 계속 걸어갈지 아니면 조심해서 자동차를 피해 가야 할지를 판단할 수 있었다.
그 동안의 무인자동차에는 이러한 의사 소통 기능이 부족했다. 길을 잘 인식하고 장애물을 회피하여 목적지에 도착하기 위해 외부 상황을 인식하는 센서 시스템은 발전했지만, 자동차의 상태를 외부로 나타내는 것에 대해서는 많은 고민이 있지는 못했다. 자동차가 길을 잘 찾는 것이 우선은 해결해야 할 문제였기 때문이기도 했다.
자율주행 기술이 성숙해지면서 이제는 무인 자율주행 자동차가 실제 길거리로 나오게 되었고, 결국에는 사람과 함께 공존하는 상황에 놓이게 되었다. 사람이라는 변수를 고려하지 않을 수 없게 된 것이다. 특히나 사람의 안전이라는 이슈가 접목이 되면서 무인 자율주행 자동차의 목적은 길을 잘 찾아가는 것에 그치는 것이 아니라 사람으로 하여금 무인자동차가 위험 요소가 아니라는 것을 느끼게 해야 하는 임무도 가지게 되었다. 그런 면에서 이번 벤츠사의 시도는 무인자동차를 그저 일 잘하는 기계로 본 것이 아니라 사람과 의사소통하고 상호작용해야 하는 능동적 주체로 인식하기 시작했다는 것에 더욱 주목이 된다.
무인자동차를 로봇으로 치환해도 마찬가지 논리가 적용될 수 있다. 로봇이 서비스 로봇으로 넘어오면서 사람과 공존하는 상황에 놓이게 되었고, 결국 로봇도 사람의 안전을 고려하여 개발되어야 하는 미션을 부여 받게 된 것이다. 로봇 팔의 예를 들면, 로봇 팔은 공장에서 정해진 규격의 환경에서 일을 할 때에는 정확하고 빠르게 일 처리를 하는 것이 중요했지만, 사람과 협력해야 하는 공장이라면 정확하고 빠르게 일 처리를 해야 하는 것 이상으로 로봇 팔 주위의 인간 노동자를 해치지 않도록 주의해야 한다.
▲ 로봇 벡스터(Baxter)와 인간 동료가 어깨동무를 하고 있는 모습
리씽크 로보틱스(Rethink Robotics)의 로봇 벡스터(Baxter)는 다른 로봇 팔과 달리 사람의 눈이 그려진 태블릿 얼굴을 가지고 있다. 태블릿에 그려진 눈동자를 통해 무언가를 실제로 보지는 못하지만, 이 눈동자를 통해 사람은 로봇이 어느 작업에 집중하고 있는지 직관적으로 알 수 있다. 이는 사람과 협력하는 작업 능률을 높일 뿐만 아니라 사람으로 하여금 로봇이 어느 방향으로 움직이고자 하는지를 예측하는데 도움을 줄 수 있어서 안전사고를 미연에 방지할 수도 있게 해준다. (물론 태블릿 얼굴은 사람에게 친근감을 느낄 수 있도록 하는 여러 가지 다른 목적도 있다.)
사람들은 자신이 모르는 것이나 다룰 수 없는 것에 대해 두려움을 느끼거나 거부감을 가진다. 심리학자 에드워드 토리 히긴스(Edward Tory Higgins) 교수는 사람에게 이득/손실에 대한 동기뿐 아니라 무엇이 진짜인지를 알고자 하는 동기, 그리고 주도권을 갖고자 하는 동기가 있다고 설명한다. 이러한 동기들이 만족되었을 때는 행복감을 느끼지만, 그렇지 않은 경우에는 불안함과 상황에 대한 낙담을 느끼게 된다.
이것을 사람이 로봇을 대할 때의 상황으로 적용해보면, 사람은 로봇이 어떻게 동작하는지 알고 싶어 하고, 로봇을 자신이 다룰 수 있다고 생각할 수 있어야 한다. 만약 이것들이 만족되지 않는다면 로봇이 실질적 위험 요소를 가지지 않더라도 사람은 로봇으로부터 공포감이나 거부감을 느끼게 될 수 있는 것이다. 로봇에 대한 ‘기술공포증(technopanic 또는 technophobia)’이 바로 이러한 이유에서 오게 된다.
로봇이 실질적 위험 요소를 가지고 있을 가능성까지 더해지면, 로봇이 어떤 의도를 가지고 있는지 모를 경우 문제는 더욱 심각해진다. 영화 ‘엑스 마키나(Ex Machina, 2015)’에 나오는 인공지능 로봇은 자신이 목적하고자 하는 바를 사람에게 철저히 숨긴다. 그것은 로봇 자신이 갇혀있는 실험실을 탈출하는 것이었다. 대신 로봇은 연기를 통해 주인공이 자신을 좋아하게 만들고, 자신을 만든 개발자까지 배신한다. 결국 로봇의 속내를 알 수 없는 사람은 로봇에게 속수무책으로 당하고 말았다. 물론 영화에 나오는 인공지능은 먼 미래의 이야기이기 때문에 현재 걱정할 필요가 있는 것은 아니지만 앨런 머스크(Elon Musk)에 이어 빌 게이츠(Bill Gates)도 인공지능의 위험성을 경고한 요즘 영화 엑스 마키나는 대중에게 충분히 생각해 볼만한 이슈를 던지고 있다.
▲ 영화 엑스 마키나(Ex Machina, 2015)의 주인공 로봇
로봇은 포커페이스가 가능하다. 사람처럼 ‘어쩔 수 없이 표현’되는 동기나 의도들이 로봇에게는 ‘의도적으로 변형되어 표현’될 수 있다. 로봇이 거짓말을 할 수 있게 되었을 때, 우리는 인공지능의 발전에 감탄을 해야 할까, 아니면 사회적인 경각심을 일깨우는데 더 노력을 해야 할까? 거짓말을 하는 포커페이스의 로봇이 가능해 진다면 사회적인 위험성을 고민하지 않을 수 없을 것이다.
이러한 위험성을 해소하기 위해 앞서 로봇을 개발할 때 로봇의 속내가 내비치어 지도록 구현하는 것이 필요해 보인다. ‘속내’라는 표현을 쓰긴 했지만, 로봇의 ‘내부 상태’나 로봇 내에서 설정된 ‘목표’를 의미한 것이다. 오늘날에는 앞서 벤츠사의 자율주행 자동차나 로봇 벡스터의 경우가 로봇의 상태를 외부에 능동적으로/적극적으로 나타냄으로써 사람이 자동차나 로봇에게 느끼는 불확실함을 해소시켜준 예라고 볼 수 있다.
영화 ‘아이, 로봇(I, Robot, 2004)’에서는 로봇이 자신의 속내를 적절히 내비치어 사람과 긍정적 협력을 한 예를 보여주었다. 주인공 로봇은 영화 후반에 인간 주인공에게 윙크를 하면서 자신이 인간 편임을 확신시켜 주었고, 결국 윙크 하나로 로봇과 인간은 협력하여 위기를 극복할 수 있었다. 윙크가 있기 전까지 인간 주인공은 로봇이 사람을 해치기 위해 행동하는 것으로 오해하고 있었다.
▲ 영화 아이, 로봇(I, Robot, 2004)에서 주인공 로봇이 사람을 협박하고 있는 것처럼 연기하고 있는 모습
이처럼 로봇이 자신의 상태나 의도를 내비침으로써 사람이 로봇의 행동을 예측할 수 있게 된다면 로봇에 대한 신뢰도가 높아지는 효과를 가져올 수 있을 것이다. 또한, 로봇이 정상적으로 동작하고 있을 때뿐 아니라 제대로 작동하고 있지 않을 때에도 사람이 이를 예측할 수 있기 때문에 로봇에 대한 안전성이 오히려 높아질 수 있다.
아직은 더 많은 고민과 응용분야들이 나와야 하겠지만, 로봇이 능동적으로 자신의 상태를 표현하게 하는 기술들이 시도되고 있다. 개발자들이 로봇을 개발할 때 이러한 고민들을 함께 하고 사회적인 합의가 이루어질 수 있도록 노력한다면 미래의 로봇뿐만 아니라 현재 이슈화가 되고 있는 자율 로봇의 안전성과 신뢰도에 대한 문제도 해결해 나갈 수 있을 것으로 기대된다. ▒이원형 ㆍKAIST 로보트 연구실